

Комбинирајќи ја древната вештина на оригами (создавање форми со превиткување на хартија) со современите материјали, истражувачите создадоа нов тип на мек робот налик на гасеница, кој се витка и спровнува низ лавиринти. Роботот е составен од повеќе модуларни сегменти што можат да функционираат како независно така и во една поголема целина во рамките на која тие комуницираат едни со други.
„Концептот на меки модуларни роботи може да даде увид во идните меки роботи што ќе можат да растат, да се саморепарираат и да развиваат нови функции“, пишуваат истражувачите во трудот објавен во Proceedings of the National Academy of Sciences.
Меките роботи претставуваат машини изработени од материјали што лесно се деформираат, наспроти “класичните” роботи кои најчесто ги поврзуваме со крутите материјали. Ова ги право мошне погодни за извршување на специфични задачи како, на пример, движење низ сложени околини или, пак, зафаќање предмети. Но, мекоста честопати се нарушува со вградување на цврста опрема за управување со ботот, при што се намалува целокупната флексибилност. Новиот дизајн го надминува овој проблем со вградување на системот за управување директно во телото на роботот.
Честопати, изгледот на меките роботи е инспириран од природата. Па така досега сме виделе меки роботи во вид на риби, медузи, пеперутки, полжави, човечки раце,... За новиот робот, инспирацијата повторно пристигнала од формата на скромната гасеница.
„Иако начинот на којшто гасениците се движат и ползат се наголемо проучувани во дизајнот на меки роботи, управувачкото движење со локална контрола на превиткувањето останува предизвик“, пишуваат авторите.
Флексибилните сегменти од роботот Caterpillar можат индивидуално да ползат нанапред, да се наназад, да соберат товар и да се здружат во една подолга нишка.
„Секој од сегментите може да биде индивидуален уред и тие можат да комуницираат едни со други и да се ‘здружат’ на команда“, вели еден од авторите Туо Жао од Универзитетот Принстон (САД). „Тие можат лесно да се раздвојат и ние користиме магнети за да ги поврземе“.
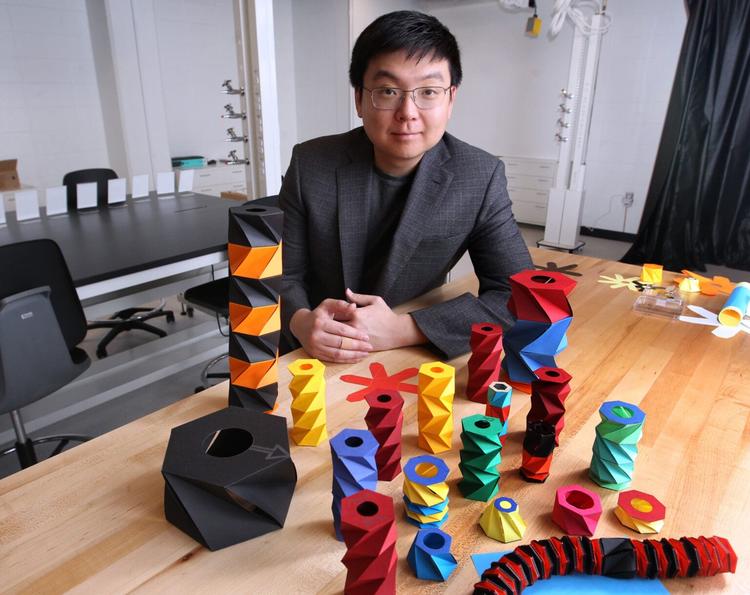
Постдокторандот Туо Жао и некои од оригами формите што се користат во проектите фото: Универзитет Принстон (Creative Commons лиценца)
Цилиндричните сегменти на роботот имаат карактеристики на оригами-форма, позната како Креслингова шема. Ова им овозможува да се усукаат во рамен диск и повторно да се рашират во цилиндер. Со помош на ваква, наизменична промена на формата роботот може да се движи и да ја менува насоката на движење.
За да ги овозможи овие движења, тимот употребил два материјалаа кои се собираат или растегнуваат различно кога се загреваат. Вдолж наборите е сместен тенок грејач од сребрена нано-жица. Кога електричната струја минува низ жицата, материјалите се шират или се преклопуваат вдолж лентата. Преку нагодување на струјата истражувачите можат прецизно да го контролираат “диплењето” и превиткувањето на роботот за да го придвижат и да управуваат со него.
„Создадовме био-инспириран мек модуларен оригами робот од типот вклучи-и-користи (plug-and-play), којшто се погонува со помош на електротермална активација со свитливи и прилагодливи грејачи“, вели првиот автор на трудот Глаушио Паулино (Glaucio Paulino). „Ова е технологија што многу ветува, со потенцијал за развој на роботи кои можат да растат, да се саморепарират и да се прилагодат на барање“.
Оригами ботот или мекотела робо-гасеница фото: Универзитет во Принстон (CC лиценца)
Постдокторандот Туо Жао и некои од оригами формите што се користат во проектите фото: Универзитет Принстон (CC лиценца)