

Идејата за развој и конструкција на електронски управуван катапулт ја добив пред повеќе години, по гледањето на неколку видеа на YouTube на оваа тема и во обид конечно да најдам примена на некои компоненти, коишто претходно беа извадени од стари или неисправни електронски уреди и веќе предолго чекаа да бидат употребени во некој новодизајниран уред.
Ако пребарате на YouTube за катапулти во кои има некаква автоматика, ќе видите дека во еден значителен дел од резултатите се претставени решенија во кои конструкторите употребиле серво-мотори управувани со Ардуино, што и не е за изненадување, со оглед на популарноста на оваа платформа. Но, за разлика од нив, јас уште на почетокот одлучив да најдам и да претставам решение во коешто нема да биде употребен микроконтролер и покрај тоа што не ми недостасуваа знаења или искуство во тој дел. Добро, еве, признавам и дека таа одлука беше делумно условена и од навиката да размислувам за класични решенија, во кои ќе бидат употребени само дискретни електронски компоненти и аналогни и дигитални интегрирани кола, при што ќе биде исполнето и барањето за минимална сложеност на готовиот уред. Но, без разлика на моите лични склоности во тој поглед, сметав дека ова сепак е многу добар пример да им покажам на електроничарите од помладите генерации, дека не треба секогаш да прибегнуваат кон решенија со микроконтролери и програмирање. Со други зборови, целта ми беше да покажам дека постојат и други пристапи и решенија за одреден проблем, а тие често може да бидат и поинтересни или да претставуваат и поголем предизвик.
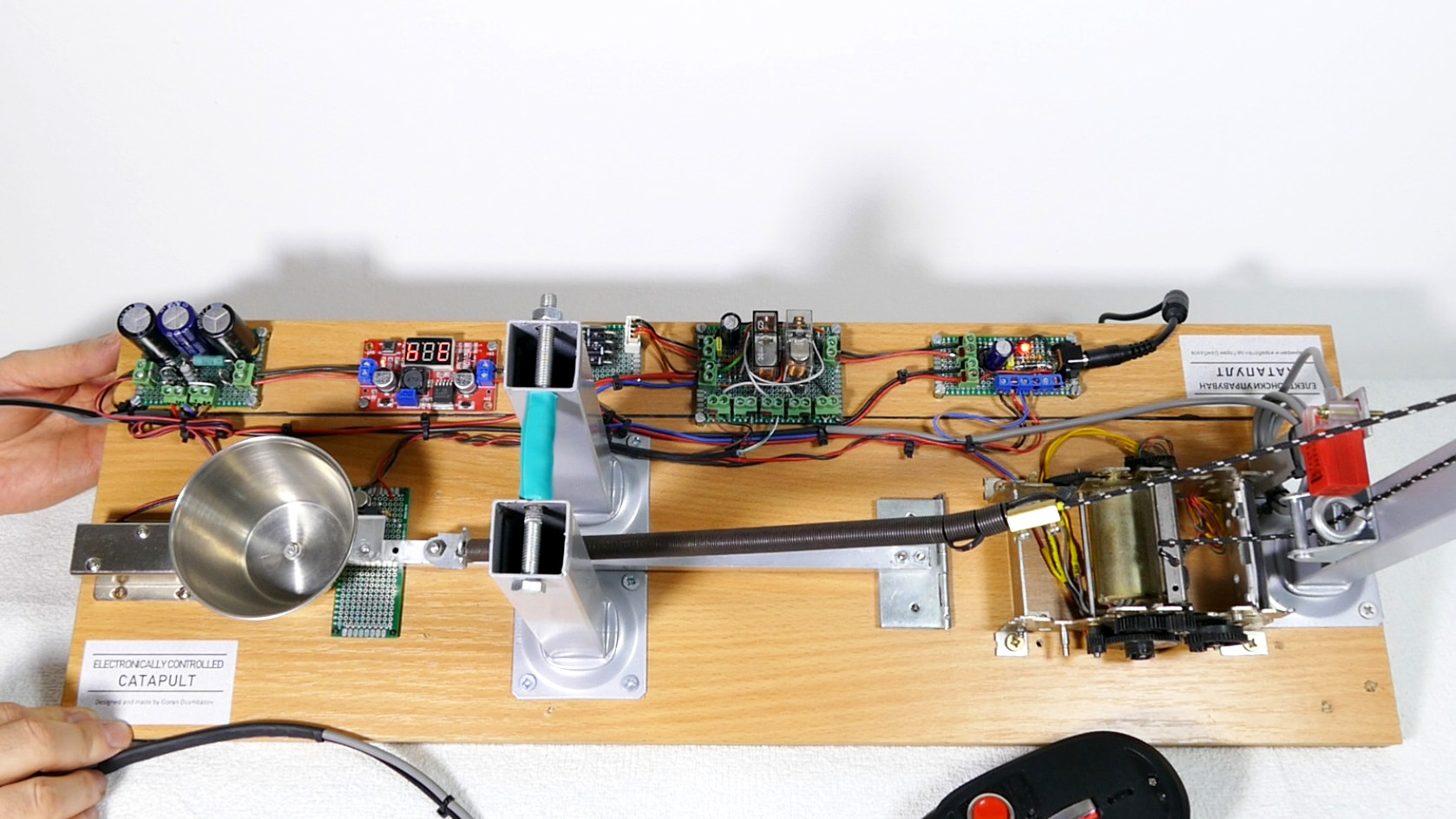
Изглед на готовиот катапулт (поглед од горе)
Така, по поставувањето на почетните критериуми и цели во дизајнот и по утврдувањето кои компоненти треба дополнително да ги обезбедам, започнав со прибирање на компонентите и со експериментирање, со цел да потврдам колку изводливо е да се конструира катапултот на начинот што сум го замислил.
Тука мора да нагласам и дека од првичната идеја до готовиот функционален прототип помина повеќе време од она што го планирав, а тоа се одвиваше така главно поради покачувањето на првично поставените критериуми, додавањето на нови функции, но и поради тоа што во текот на развојот наидов и на некои мали дизајнерски предизвици во механичкиот дел.
Конкретно, до елементите кои се употребени сега во механичкиот дел (пружина, лост, рамка за сопирање на лостот и држач со водилки за пружината и конецот) дојдов по повеќе последователни обиди, бидејќи во претходните случаи доаѓаше до деформации и до несигурна работа на катапултот по долготрајна употреба.
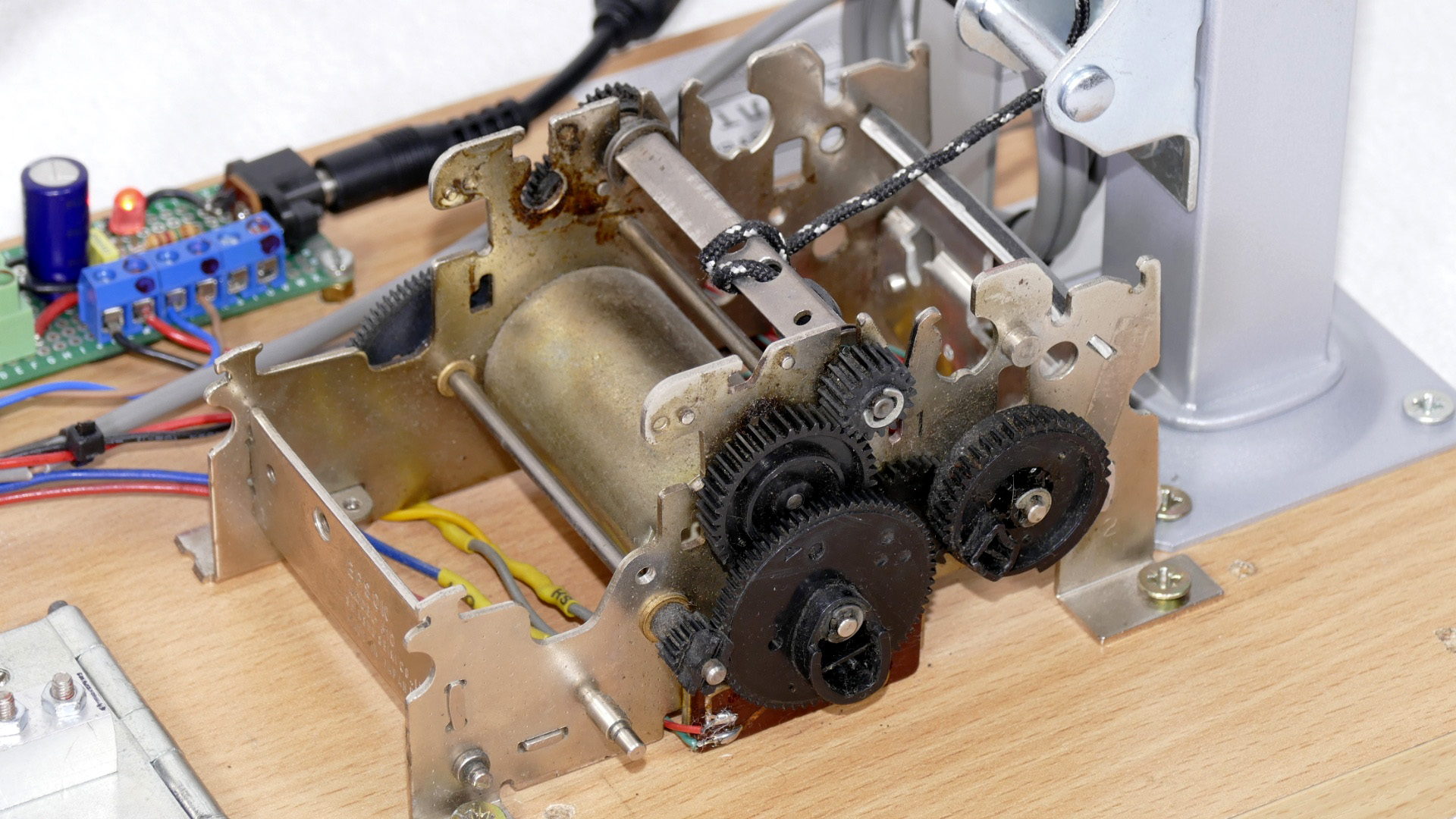
Моторот со преносниот механизам употребен во катапултот
Во делот со електрониката немаше некои особени предизвици, бидејќи се работи за познато решение за управување со насоката на движење на моторот (H-мост реализиран со два релеи), во коешто само морав да направам одредени модификации на поврзувањето во колото и да додадам дополнителни елементи, за да обезбедам и некаква заштита од грешка на операторот (стиснување на погрешна команда во текот на работата со катапултот).
Интересно беше да се одбере и со која компонента ќе се врши ослободување на лостот и активирање на катапултот (изборот на крај падна на електромагнетна брава) и да се направи соодветно коло за управување со тој дел.

Електромагнетната брава употребена во катапултот
Во секој случај, се покажа дека за сигурна и долготрајна работа на катапултот, секоја компонента треба да се одбере со особено внимание и треба да се направат тестирања во различни услови.
Во видеото подолу е демонстрирана и објаснета работата на катапултот, даден е опис и димензии на повеќето механички компоненти и шеми и објаснување на функционирањето на сите електронски модули и употребените сензори.
Голем дел од материјалите и електронските компоненти се достапни и локално, па така, секој кој сака да конструира ваков или сличен катапулт, не би требало да има проблем во тој поглед.
Ќе додадам само уште неколку технички детали за моторот и преносниот механизам, кои не се директно кажани во видеото, а ќе ви бидат потребни ако се одлучите да изработите катапулт сличен на овој:
Поглед на електронските модули и сензори
Во мојота изведба, за затегнување на пружината и за враќање на лостот во почетната положба, искористив мотор со преносен механизам (редуктор) изваден од стар канцелариски дигитрон (оние на кој освен на дисплеј, резултатите се печатеа и на хартиена ролна). Брзината на вртење на оската на која се намотува конецот е приближно 160 вртежи/мин, брзината на намотувањето на конецот е приближно 8 cm/s, а вртливиот момент треба да биде доволен, за да се обезбеди целосно затегнување на пружината, без притоа да дојде до преоптоварување на моторот.
Ако немате ваков или сличен мотор со редуктор, да ве потсетам дека на AliExpress се достапни мотори за еднонасочна струја (со редуктори), со голем избор на напони и преносни односи.
Секако дека има простор и за понатамошни унапредувања и додавање на нови функционалности на овој катапулт и тука вашите коментари и идеи во врска со тоа се добредојдени.
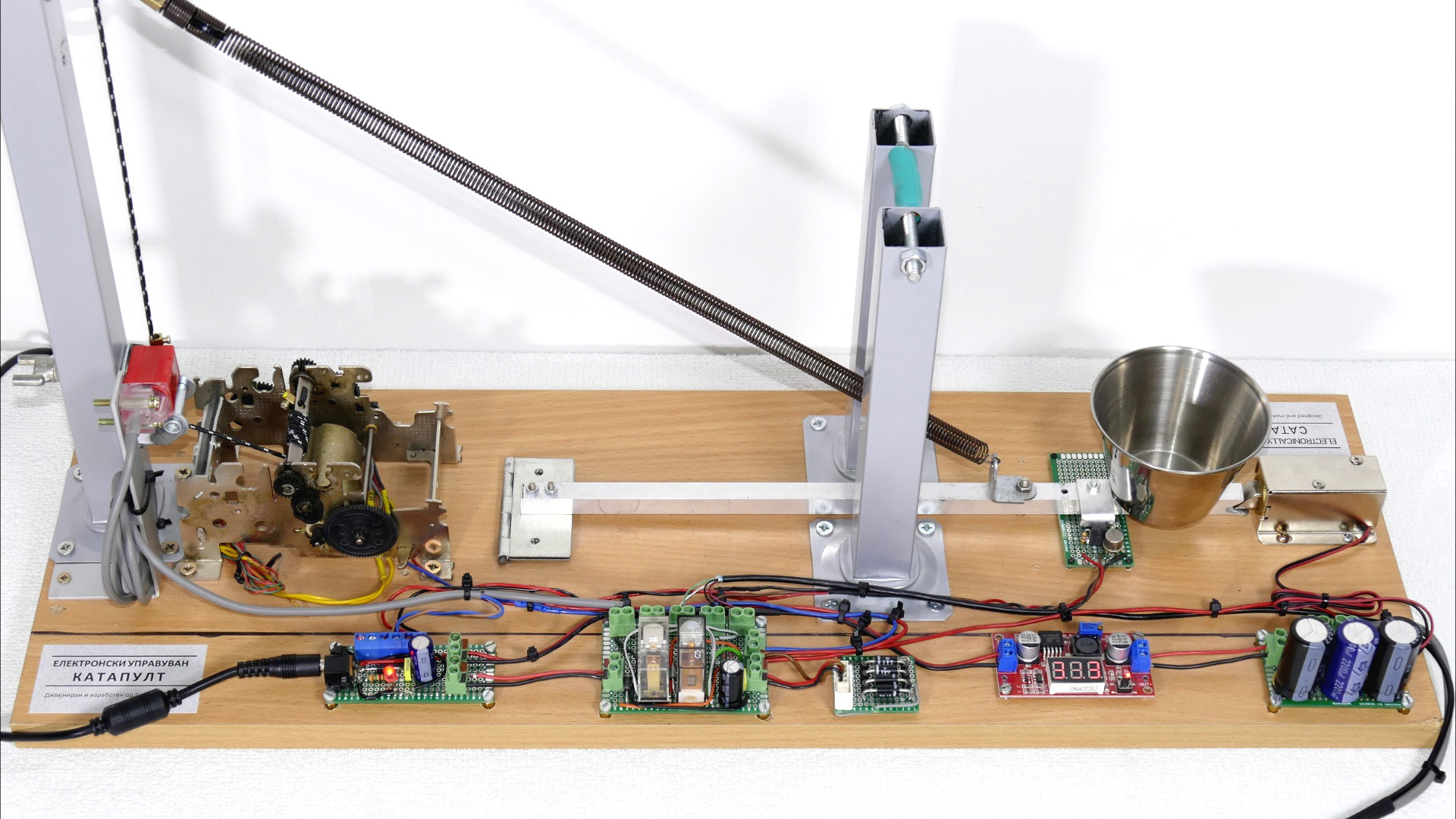
Изглед на готовиот катапулт
Изглед на готовиот катапулт (поглед од горе)
Моторот со преносниот механизам употребен во катапултот
Електромагнетната брава употребена во катапултот
Поглед на електронските модули и сензори